Almost a copy from here.

Diagram from the original site:
Inside:

and during testing:

Works nice, handy for testing old caps.
Have a nice day!
Almost a copy from here.
Diagram from the original site:
Inside:
Works nice, handy for testing old caps.
Have a nice day!
As title says; a simple capacitance meter.
One youtube video by VK3YE was enough to get me started building, after all, the meter that I was using before was not behaving correctly (latter found the problem).
The outcome was this:




To calibrate I used a 68pF and 27pF capacitor, the idea was not to have highest precision possible only to be in a position of having certain about unmarked capacitors.
Some description/schematic from here and here:

I used different Ge diodes and the 10K pot was changed for 2 of 5K in series to give better adjustment range. The Zener was changed to 6.8v.
Ranges like this:
E: 100pF
D: 1nF
C: 10nF
B: 100nF
A: 1uF
Have a nice day!
Not planing to build any electronic clock but who knows. Just found one of those round clock crystals and decided to give it a go.
The diagram and assembly



Have a nice day!
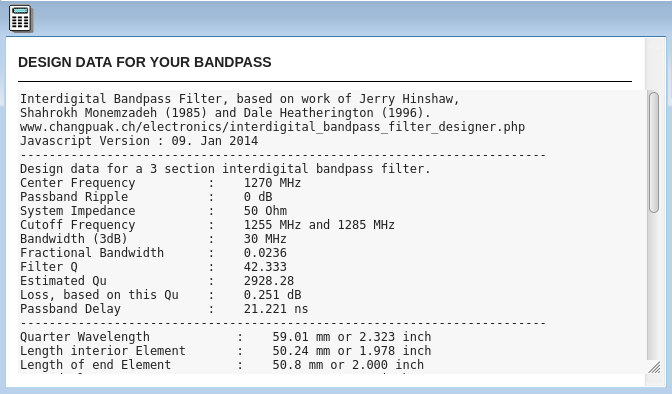
Part of a project on 1.2Ghz that will include this band-pass filter.
Main dimensions got online via the tool here: https://www.changpuak.ch/electronics/interdigital_bandpass_filter_designer.php
Some details of similar construction for different frequency range (ADS-B) here: https://keptenkurk.wordpress.com/2014/11/05/a-homebrew-1090mhz-ads-b-filter/
My construction:



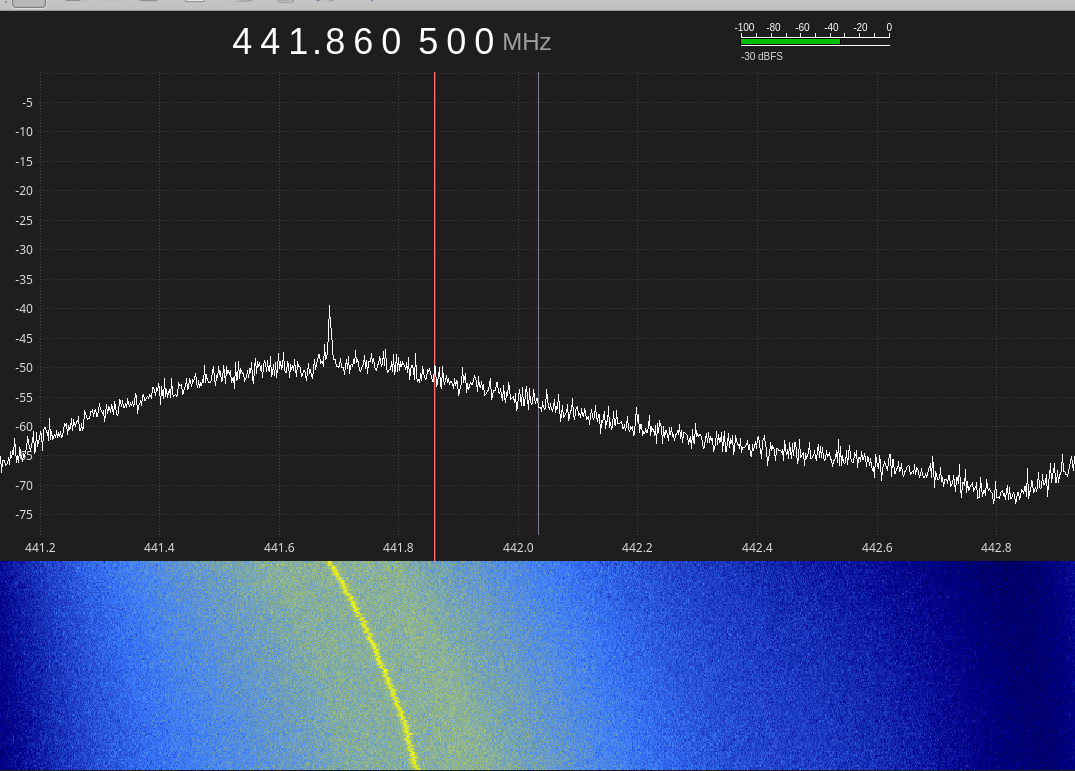
And the outcome:

Regarding results; not the best optimization for attenuation but not bad either considering the dimensions and construction not to the greatest dimensional andards:

Have a nice day!
A power supply for a future tube/valve tester

Main circuit for the positive side is similar to the one bellow (the top section),

The negative supply is similar to the diagram bellow("Standard") with small adaptations to allow 2 different ranges:

There's a separate transformer for each of the supplies; the filament the positive and the negative, also other separate on to power the voltage meters.
Was added a small relay controlled high voltage supply output so I don't get accidentally zapped, you need to constantly press enable button to have high voltage output at the terminals.
The internals:


Working during testing:

Now I still need the tube socket and metering part for the full valve/tube test set, eventually something like this (only the top section):

Have a nice day!
I have some spare ATmega328 chips that are not programed and can be used in some projects specially now the prices Arduino boards got some inflation.
In order to upload the program to the IC's you will need to burn first the bootloader, at least so that later you then upload via de Arduino IDE.
Schematic and instruction are from here: https://docs.arduino.cc/built-in-examples/arduino-isp/ArduinoISP
End result:

Another view:

For uploading: select the Arduino programmer USB port and then the programmer type "Arduino as ISP", in the end just "burn bootloader".

After bootloader burn:

Have a great day!
As part of the construction of a QO-100 station decided to try and convert a common satellite LNB from internal PLL crystal reference to an external one.

This is the inside of the LNB after plastic and metal cover removed:

Another view bellow. The crystal oscillator is on the other side of the PCB so it's needed to de-solder the F plugs terminals (top left and right):

After completion of the operation I can confirm It does work, still need to do more testing with different input signal reference, at the moment it accepts/works from around -10dbm to 0 dbm. Also tried to inject different reference besides the 25Mhz to shift the IF and works with ref. higher than the 25Mhz, bellow testing with 25.787Mhz as the PLL reference
The mod bellow, I also had to remove one cap from the input line to the output filter so that there is no load to the reference signal in.

This is the original schematic (it's a RDA3567 chip on the LNB board) with the mods made:

The capacitor used was one of the ones that were connected to the 25Mhz crystal on the original diagram
To remove the original crystal since I don't have SMD tools, I placed the iron with a bit of solder on top of it and waited for warming up the underlying terminals until it could be removed (note: this voids the warranty).
Another view of the LNB inside:

I also tried injecting on the LNB a parallel signal from the reference oscillator in the ADF4351 generator board to good success. Bellow the part where I took the signal from the ADF4351 reference:

I connected to the terminal normally used for the reference input and bridged the missing place for the 0 ohm resistor case you reference it externally.
Let's see in the future how stable is this internal reference of the AD4351, if good enough it avoids having to build an external TCXO for the LNB.
Have a nice day!